10 Sep 2014
Note: This article has been updated with more photos and details describing slip ring installation.
Youthful exuberance drove me to pilot my OpenROV before I built a good tether management system. Bad idea! It’s better to have a tether management plan (any plan) before you pilot your OpenROV.
This article describes a tether management system that works for me. Other OpenROVers have devices that work, too. Take a look at a few and eventually you will find one that fits you.
Off-the-Shelf Parts
This tether management system is constructed entirely from off-the-shelf parts. The main component is an extension cord reel sold by Home Depot for about $14.00. Buy it, gut it, add the slip ring using three screws (also from Home Depot) and you’re good to go.
Continue reading →
09 Sep 2014
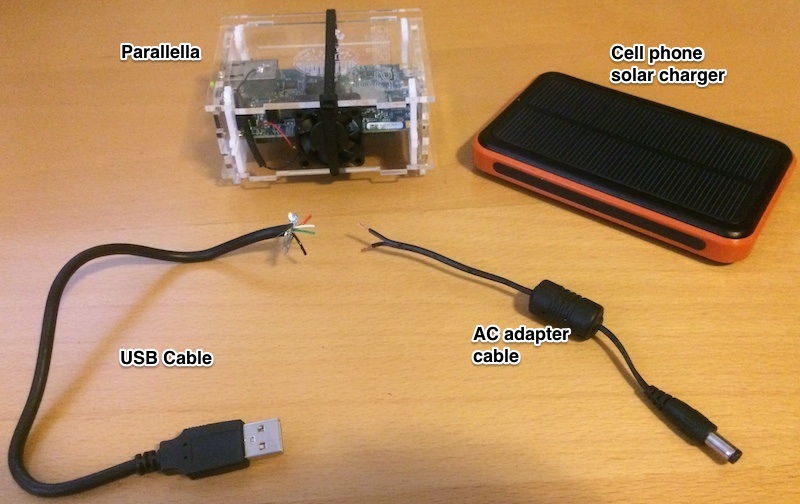
This article describes a simple hardware hack: Making the Parallella run on solar energy.
Motivation: The fastest computers in the world gulp electricity at an alarming rate. For example, Tianhe-2 at the National Super Computer Center in Guangzhou, China uses 17.8 megawatts of energy per year. In dollars, that’s roughly $17 million spent on electricity spent each year, depending on how the electricity is sourced.
Scientists at Sandia National Laboratories estimate that the earth’s surface absorbs enough solar energy in ninety minutes to power every electrical device on the planet for a full year. A year’s worth of energy in ninety minutes! Surely we can use some of that energy to power our supercomputers.
Continue reading →
22 Aug 2014
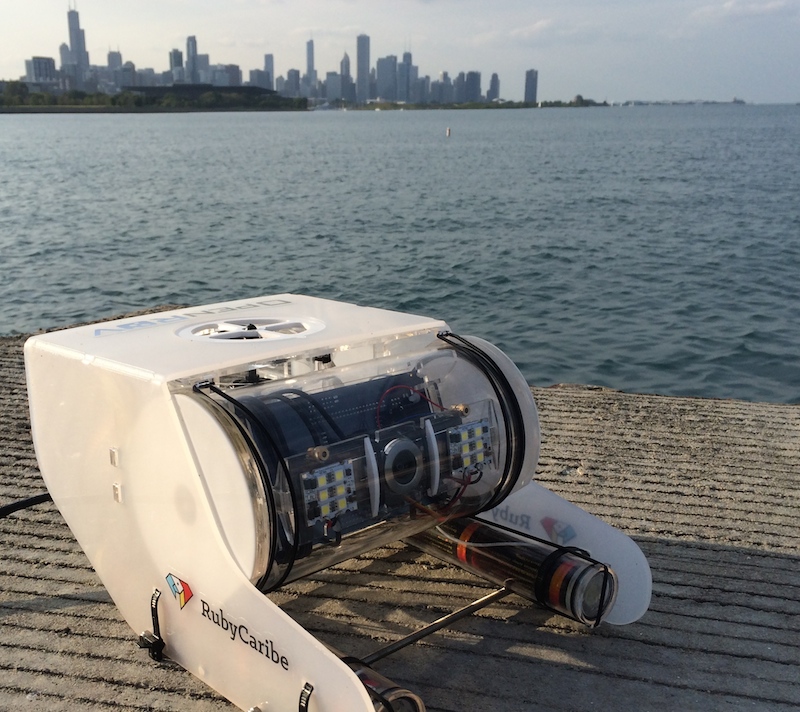
OpenROV #1227 went for a spin in Lake Michigan this week. Success! Here are a few first-voyage observations:
Continue reading →
21 Aug 2014
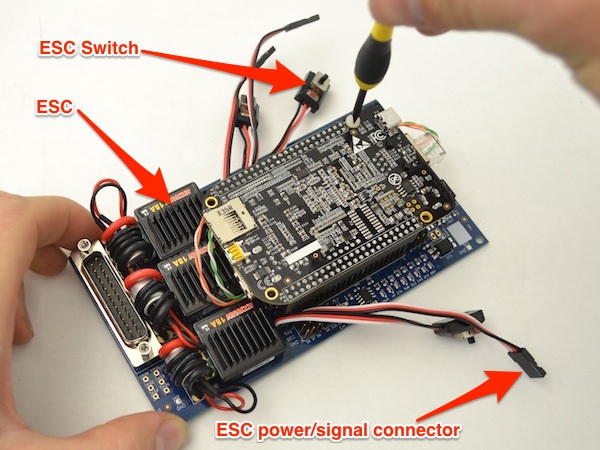
ESCs: New Experience for Me
Electronic speed controllers (ESCs) were completely new to me when I first assembled my OpenROV. This article documents my initial misunderstanding (and eventual understanding) of ESCs so that future builders can move forward with fewer glitches.
Continue reading →
19 Aug 2014
I know this problem can be solved. I just haven’t figured it out yet, and I need help from the OpenROV community to do so.
Update: The OpenROV community delivered. Solution: ESC Programming and Calibration for OpenROV.
Parts That Work
Software image updates on the Beaglebone Black work flawlessly thanks to scripts written by Brian Adams and Dominick Fretz. The cockpit software shows a real-time image from the camera, the LED lights are super-bright, and the lasers hold steady at 10cm apart. My fully assembled OpenROV passes the water submersion test. Yes, it’s waterproof, thanks to O-rings and silicon-based lubricant!
What about the motors? The motors work, almost. Could it be the
electronic speed control (ESC) settings, calibration, or less than
perfect soldering? That’s where I need help.
Continue reading →